Technical Information
自動運転の実現に向けた国土交通省の取り組みについて

現在我が国では、自動運転の実現に向けて政府の関係省庁が一丸となって取り組みを進めています。本日はその中から、私が所属する国土交通省の活動について、これまでの実績や今後の展望等を交えながらご説明します。
※この記事は、『ベリサーブ オートモーティブ カンファレンス 2022』の講演内容を基にした内容です。

国土交通省 自動車局 自動運転戦略室 室長 多田 善隆 氏
自動運転実現に向けた政府の推進体制
図1は、自動運転に関する各省庁の組織体制と役割の概要です。まず全体を取りまとめるデジタル庁では「官民ITS構想ロードマップ」という、自動運転の目標を策定しています。これを達成するために、各省庁がそれぞれの役割に従って取り組みを進めていくというのが基本的な体制です。
警察庁では自動運転の交通ルールに関する検討、法務省は刑事責任の在り方、経済産業省は自動運転の技術開発、総務省では通信に関する検討を行っています。そして国土交通省には自動車局と道路局があり、私が所属する自動車局では車両の安全基準の策定、道路局では道路基準に関する策定を行っています。

自動運転の意義
国土交通省での自動運転に対する取り組みをご説明する前に、まず自動運転の意義についてご説明させていただきます。
死亡事故の原因は、90%以上が運転者の違反によるもので、これを適切なシステムに置き換えることができれば、交通事故を大きく削減することにつながります。このように自動運転の意義としては、まず交通安全の推進があります。また、免許返納などに伴う高齢者等の移動支援、トラックやバスなどのドライバーの不足への対応、日本の自動運転技術の国際標準化による国際競争力の強化なども挙げられます。
自動運転のレベル分け
ご存知の方も多いと思いますが、自動運転には5つのレベルがあります(図2)。レベル1と2は、自動ブレーキや自動で車線変更などのフット・フリー、ハンズ・フリーでの運転となりますが、ドライバーが周辺監視を行うため、どちらかというと運転支援という位置付けです。
レベル3からは周辺監視をシステムが担う、一般的なイメージの自動運転になります。レベル3は一定の条件下で安全が保証される自動運転で、この条件を我々は「走行環境条件」と呼んでおり、場所・天候・時間帯などが該当します。走行環境条件から外れた場合、例えば急な大雨が降った時などはシステムが警報を発して、ドライバーがすぐに運転を引き継ぐのが前提となっています。
レベル4では走行環境条件を外れた場合の対応もドライバーではなくシステムが実行し、速度を緩めて路肩に寄せるといった対応が自動的に行われます。ドライバーのいない無人運転も可能になりますが、これもレベル3と同様に走行環境条件下であることに変わりはありません。
レベル5は全ての走行環境条件を取り払い、いつでもどこでも自動運転を可能にするものですが、実現には相応の時間を要する見込みです。

自動運転技術の現状
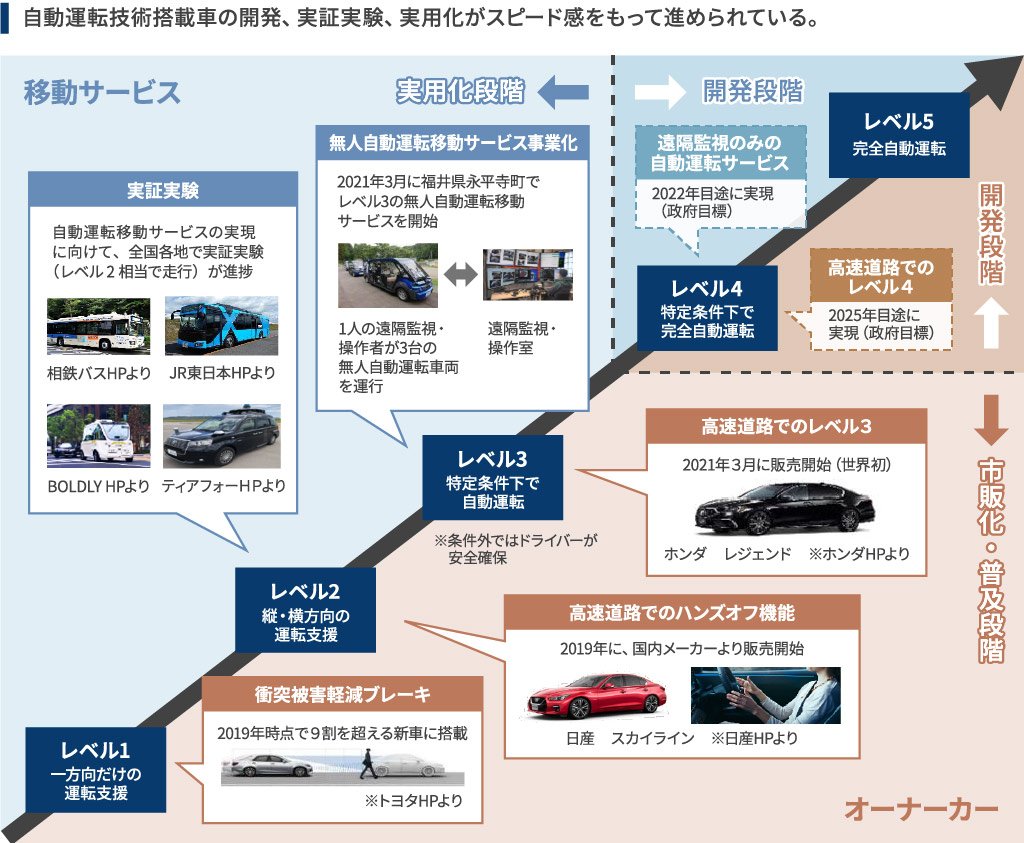
図3は、自動運転の現状を図式化したもので、右上に向かう矢印が自動運転のレベルを示し、その下側が自家用車、上側が公共交通等の移動サービスで、それぞれの分野における動向を示しています。レベル1では、すでに新車で販売されるクルマの90%に「衝突被害軽減ブレーキ」が装備されています。
レベル2では、TV CMでお馴染みのハンズ・フリーが可能な自家用車が販売されています。移動サービスについても、全国各地で自動運転の実証実験が実施されています。
レベル3になると、国内での事例は現状2つしかありません。1つは2021年3月に国土交通省が型式指定、つまり道路走行の認可を出したもので、自家用車では世界初となります。もう1つが福井県永平寺町で行われている、1人の遠隔監視・操作者が3台の無人走行車を運行するというもので、すでに有料の移動サービスとして開始しています。
レベル4からは今後の目標となり、移動サービスでは2022年を目途に実現を目指しています。レベル3で紹介した福井県の事例は、現状は遠隔で監視をしつつ万一の場合は人間が運転を代わるというものですが、これをレベル4に引き上げて遠隔監視のみとします。自家用車については少し先で、2025年に高速道路でのレベル4という目標が掲げられています。
最後のレベル5については、残念ながら現状の技術レベルではまだ構想段階で、具体的な目標設定はこれからという状況です。
混在空間における自動運転の課題
自動運転では何が難しいか、自動車メーカーなどの開発状況をヒアリングし、まとめた課題をご説明します。
最初に、信号の認識です。複雑で迷ってしまうような信号の認識、複数信号への瞬時の認識、逆光による色認識、前をふさぐ大きな車両、大雨・大雪などの悪天候での認識などの難しさがあります。
次に、走行環境です。道路を道なりに走るために必要な白線が積雪で認識できない、路上駐車を自動回避できない、どこを走ればいいのか走行車線が分からないなどがあります。
その他、人であればうまく変化に対応している交差点や不意の飛び出しでの対応など、今後の状況変化の予測判断の難しさがあります。さらに、坂道と障害物の違いの認識、センサーによる検知をどの範囲まで行うかといった難しさもあります。
国土交通省の取り組み
ここから国土交通省の取り組みについて、自家用車、移動サービス、物流サービスの3つに分けてご説明させていただきます。
■自家用車における車両の安全対策
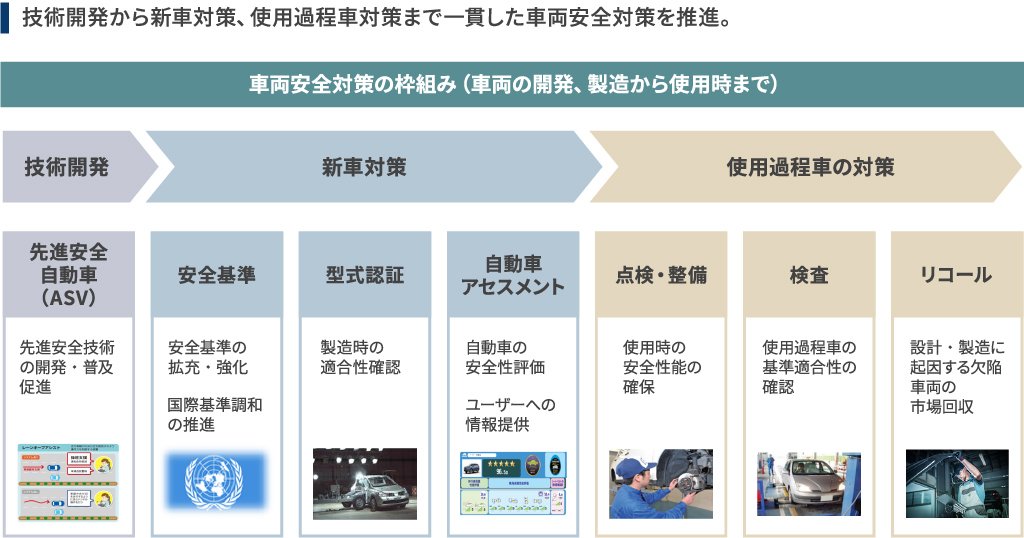
国土交通省では「道路運送車両法」という法律に基づいてさまざまな安全基準対策を行っています(図4)。「技術開発」のフェーズにある「ASV=先進安全自動車」では、基準を作る前段階で国土交通省や関係省庁、メーカー、さまざまな学識経験者などが集まって技術開発の方向性を示すガイドラインを策定し、メーカーが新しい技術を作りやすい環境を整えています。
「新車対策」のフェーズでは、国際調和も考慮した安全基準の策定、基準への適合を確認する型式認証を経て、自動車アセスメントで安全性の評価を実施します。評価結果は一般に公表され、ユーザーの車種選定の参考として情報提供し、メーカーの開発促進にもつなげています。
「使用過程車の対策」では、ユーザーがクルマを購入し、使用を開始した後の措置で、点検・整備、検査、不具合が見つかった場合のリコールまでが一連の流れとなります。
道路運送車両法の改正
道路運送車両法は、クルマの開発、製造から使用過程までに対応する法律ですが、これ自体は1951年に制定されたもので、当然ですがシステムが運転するなどという状況は想定されていません。これを自動運転車に対応させるための法律改正を2019年5月に実施しました。4つの大きな改正点がありますのでご説明します。
・保安基準の対象装置に「自動運行装置」を追加
保安基準の対象装置に自動運行装置を追加しました。詳細は後述の「自動運行装置の保安基準等の概要」で説明します。
・無線によるソフトウェアアップデート等に係る許可制度創設
オンラインによる自動車のソフトウェアアップデートが一般化した場合、もし不備があれば数十万台のクルマが一気に影響を受けます。これを防ぐため、無線によるソフトウェア改変には国土交通省による認可を義務付けました。
・自動運行装置等の整備等
自動車のエンジンやブレーキなどに関わる部分の点検整備・改造を行う場合には、国土交通省の地方出先機関である運輸局の認可が必要ですが、その対象に自動運行装置を追加しました。自動運行装置のセンサーなどを取り外して整備する場合は認可が必要で、取り外しせずに少しの改造を行う場合でも認可が必要になります。
・OBD検査導入のための技術情報の管理
自動運転車の検査では、クルマに搭載された「OBD(On-Board Diagnostics)=車載式故障診断装置」にスキャンツールと呼ばれる専用の機器を接続し、記録された故障コードを検出します。そのコードが何を意味するのかが即時に把握できるよう、簡単に検索できる体制を整えました。
自動運行装置の保安基準等の概要
・性能
走行環境条件内において安全が確保されていること、走行環境条件から外れた場合に自動運転が作動しないこと。また、走行環境条件から外れる場合はそれを検知して運転者に引き継ぎの警報を発すること、さらに万一引き継がれない場合は安全に停止することなどの基準を定めています。
・作動状態記録装置
事故が起きた場合に後から検証ができるよう、作動状態記録装置の設置を義務付けています。
・外向け表示
自動運転車であることを示すステッカーの掲示をメーカーに要請しています(図5)。
これらの基準は2020年3月に世界に先駆けて日本が策定し、結果として2020年11月に世界で初めて
レベル3の型式指定が実現しました。
今後はレベル4に向けた更なる基準の強化を図っていくという段階で、その取り組みをご説明します。

図5:自動運転車両を示すステッカー
自動車安全・環境基準の国際調和の重要性
日本の自動車メーカーは生産台数の約80%を海外で販売しており、仕様や基準の策定には国際調和が大変重要になります。国連傘下の「WP29(Working Party 29)=国連自動車基準調和世界フォーラム」に車載装置ごとに分科会があり、自動運転もその1つに位置付けられていて、日本もいくつかの会議体の議長を務めています。日本の技術が世界のスタンダードとなるよう議論を主導していくことで、我が国の自動車産業の国際競争力強化につなげていきたいと考えています。
現在WP29の会議体で行われている具体的な議論としては、日本が初めて認可したレベル3の自動運転は、高速道路での渋滞時における自動追従で、速度は60km/h以下の低速で車線変更等はできません。その自動運転レベルを今後は速度を130km/h、つまりほぼ全ての高速道路をカバーするスピードにした上で車線変更も可能にすること、さらに乗用車だけでなく他の車種にも拡充することを議論しており、これも日本が主導していけるよう努力を続けています。
■移動サービスにおける主な自動運転実証実験の事例
移動サービスに関する自動運転では、全国各地で実証試験が行われており、図6は、その一部を紹介したものです。左下にある「小型カートを用いた自動運転」が福井県永平寺町の事例で、これが唯一レベル3で他はレベル2となります。

図6:【移動サービス】主な自動運転実証実験の事例
実証実験に必要な手続きについて
少し複雑な法令の話になりますが、実証実験に必要な手続きについて説明します。国土交通省というと堅いイメージがあるかもしれませんが、少しアピールさせてください。
結論からいうと、レベル2に関しては抵触する保安基準がない場合は、特段の手続きなしに公道実証が可能です。手続きが必要な例としては、遠隔にのみ運転者がいて通信遅延等の影響でブレーキが遅れる可能性がある場合や、遠隔操作が前提でハンドルのない自動運転専用車両なども基準に抵触する事例です。ただし、こうした場合にも基準緩和という制度によって、公道走行を可能にする措置を取っています。
もちろん、単純に基準を緩めるのではなく、例えば速度を遅くする、保安要員を配置する、走行場所を限定するなど、代替の安全措置を条件とした緩和制度を2017年から設けています。安全性はしっかり担保しつつも、スピード感を持った対応によって数多くの実証実験が行われています。
ただし、これはレベル2までの話で、レベル3ではそれなりにハードルが上がります。
レベル3では走行環境条件を国土交通省が申請者に付与することになりますが、その際には基準に準拠しているかどうかの審査が行われます。レベル3の認可を取得した福井県の例では、以下のような走行環境条件を付与しました。
- 1.車両が電磁誘導線の上にあること
- 2.悪天候でないこと
- 3.速度が12km/h以下であること
- 4.路面が凍結等していないこと
- 5.緊急車両が存在しないこと
基準適合の判断は、試験機関で実際にテストを実施します。走行環境条件を外れた場合に安全が確保されているかを特殊な試験場で実際に検証し、テストレポートを提出する必要があります。さらに、歩行者の通過や飛び出し、自転車の急接近や割り込みなど、走行環境条件の中であっても起こりうるシナリオを洗い出し、本当に安全かどうかをチェックします
ただ、実証実験にチャレンジする事業者の中には小規模なベンチャー企業も多く、やはりレベル3の認証取得はハードルが高い状況です。そのため、国土交通省ではクルマの安全性確保に関する設計時の留意点等を「ラストマイル自動運転車両システム」のガイドラインとして策定し、事業者を可能な限りフォローする努力を続けています。
■物流サービス分野における後続車無人隊列走行
ドライバーは1台目のみに乗車、後続の2~3台目は無人化した3台のトラックが隊列を組み、高速道路を走行する実験を2021年2月に新東名高速で実施しました(図7)
技術面では一定の成果を得たところですが、隊列の間に割り込まれた場合にどうするかといった課題も残っています。今後は2025年度を目標に、隊列に限定されず単独でも走行していけるレベル4の自動運転トラックの技術開発を推進していく予定です。

図7:【物流サービス】トラックの隊列走行
自動運転推進に向けた今後の施策
■2025年に向けたプロジェクト推進
国土交通省では経済産業省と連携・協力し、これまでの実績をベースとして2025年までに4つのプロジェクトを実施する予定です。
- 1.福井県永平寺町のレベル3の車両をレベル4にアップグレードする
- 2.上記を全国展開する
- 3.トラックの隊列走行をレベル4に進化させる
- 4.インフラの整備
4.のインフラ整備については、レベル4のサービスを全国に拡大する場合、複雑な交通環境にも対応する必要が生じるため、インフラの協調が不可欠になることを考慮したものです。
■自動運転実証車両の実例および事故実例の公表
自動運転の知見は先端技術情報であるため難しい部分もありますが、事業者の方にご協力いただき、先行事例や実験中に起きた事故の実態等の情報をホームページ(国土交通省HP)で公表して、技術開発の推進や事故の再発防止に役立てています。
■レベル4の法規要件の策定に向けた調査・検討
レベル4の実現には、ドライバーが運転環境の変化にうまく対応しているといった技術や経験に依存するような判断・操作も取り入れていく必要がありますが、こうした要素は正確にデータ化するのが困難です。そこで、ドライバーが道路上で遭遇するさまざまなイベントをドライビングシミュレーターで再現し、その対応を自動運転車に反映していく検討も始めています。これはかなり難易度が高く、中長期的な課題になっていく見込みです。
■自動運転車事故の原因究明・調査分析
自動運転の事故は原因の特定が困難なため、警察庁と連携して事故調査委員会を作っています。一旦事故が起きた場合には、さまざまな分野の専門家・有識者の知見を得て、原因究明や調査分析を進めています。
■自動運転の過信防止・啓発
自動運転車の技術を過信しないよう、次のようなYouTubeを利用した啓発活動を実施しています。
おわりに
自動運転の技術開発に当たって、日本の自動車メーカーやIT企業は懸命な努力を続けています。国土交通省は基準を作って認可する規制当局と捉えられがちですが、安全を大前提にしつつも、さまざまな事業者が積極的に自動運転を推進できるよう、今後も可能な限りの支援を続けていきたいと考えています。
関連記事
この記事をシェアする